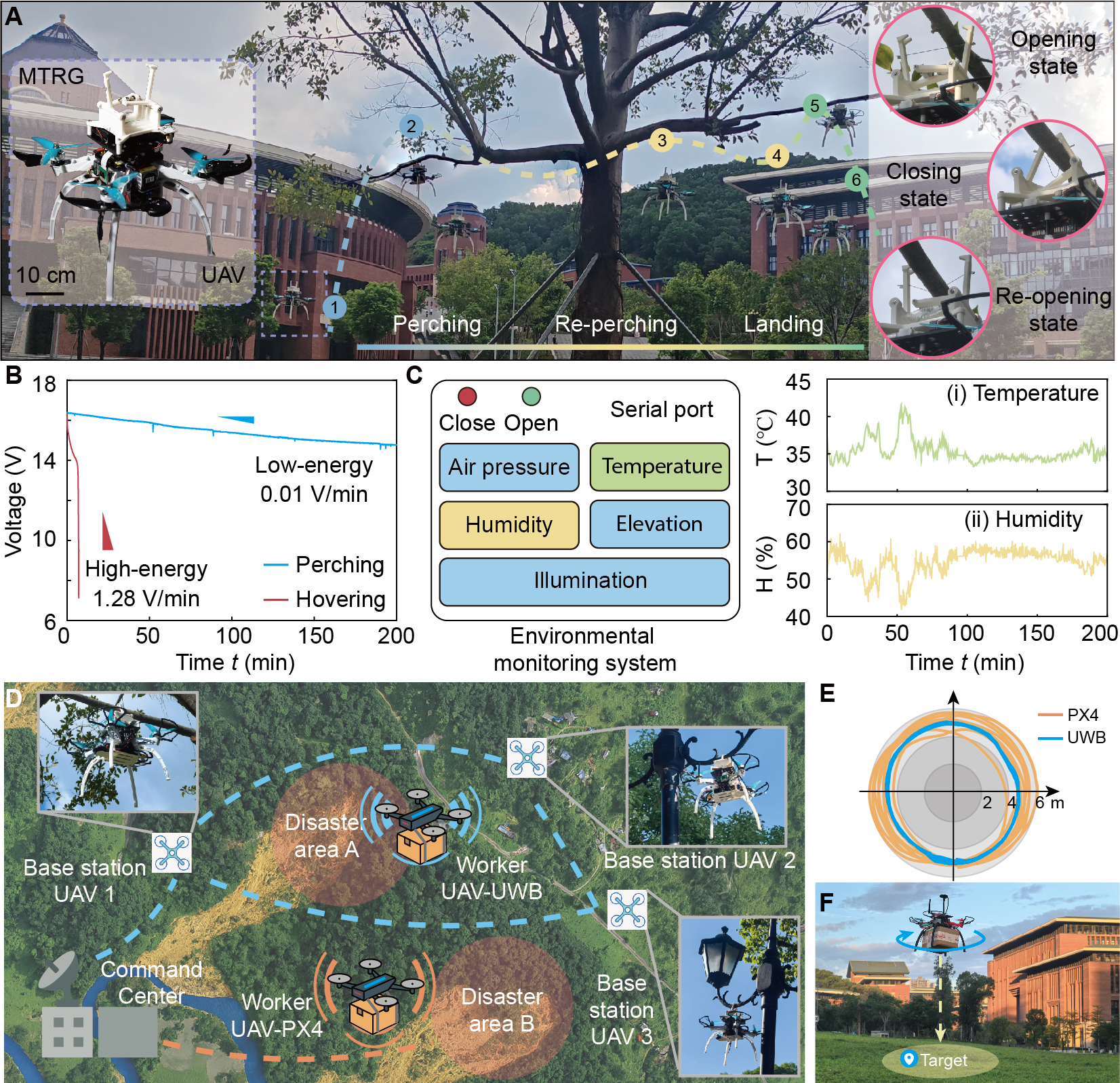
L. Han et al., “Magnetic tensegrity-enabled robotic gripper with adaptive energy barrier for UAV perching,” Cyborg Bionic Syst., vol. 0, no. ja, Jan. 2026, doi: 10.34133/cbsystems.0535.
J. Luo et al., “Stability Conditions and Stiffness Variability of General Tensegrity Systems with Kinematic Joints,” Journal of Mechanisms and Robotics, vol. 17, no. 7, p. 071002, Jul. 2025, doi: 10.1115/1.4066745.
J. He et al., “A numerical study on the hydrodynamics of a swimming crocodile model,” Phys Fluids, vol. 36, no. 3, p. 035108, Mar. 2024, doi: 10.1063/5.0191371.
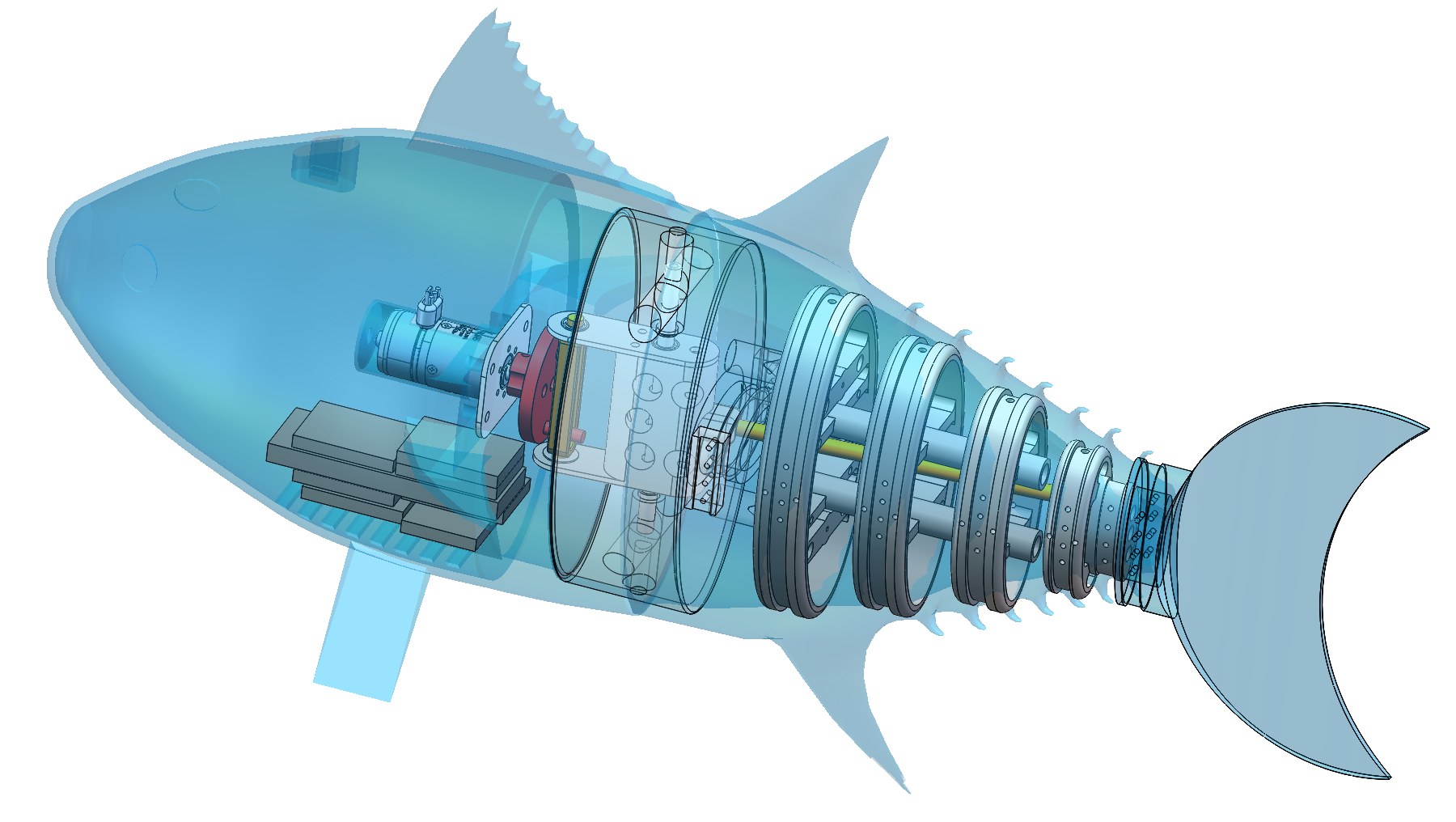
L. Han, Z. Wu, J. Luo, and X. Xu, “A Tensegrity Robotic Fish Driven by a Sliding Crank-Pendulum Mechanism,” in 2023 5th International Conference on Robotics, Intelligent Control and Artificial Intelligence (RICAI), IEEE, Dec. 2023, pp. 489–493. doi: 10.1109/RICAI60863.2023.10489797.
陈百辉, 韩路路, 王晓明, and 冯晓港, “基于翼内双滑块的变质心飞行器设计、分析与飞行试验,” 飞行力学, vol. 40, no. 3, pp. 81–87, 2022.